

他の3D技術と比べて、レーザー三角測量は、非常に高い精度(マイクロメートルに至るまで)と極めて高い速度を要するアプリケーションに最適です。カメラが動いたり(たとえば、カメラがロボットまたは人によって構えられている時など)固定され、または被写体が動いている場合(たとえば、コンベヤーベルト上にある部品を検査する時など)があります。
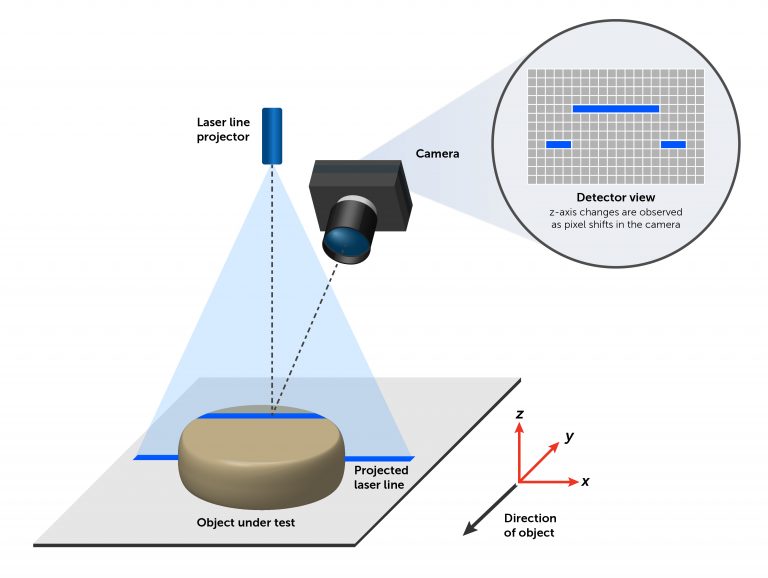
レーザー三角測量はどのように機能しますか?
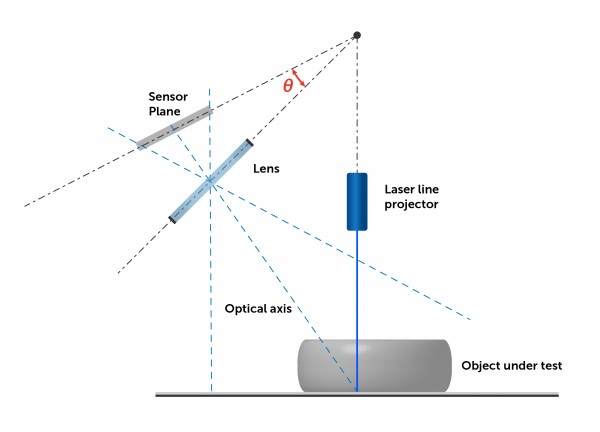
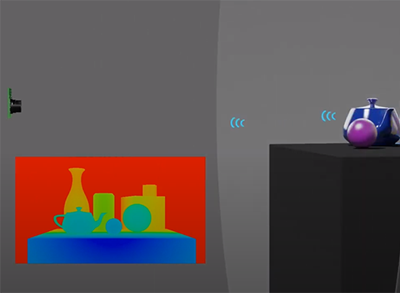
検査したい対象はY軸に沿って移動し、カメラによってスキャンされます。レーザーラインはこの軸に垂直である対象に投影され、形成されたレーザープロファイルはスキャンごとに2Dピクセルアレイで画像化されます。レーザーとカメラ間の角度と組み合わされた、対象における異なる部分の異なる高さのために、レーザーラインは、対象に投影された際にレーザープロファイルに「歪められ」ます。各画像(被写体のY方向での3Dスライスを表す)では、すべての縦列(X)内の横列は、そのポイントでの被写体の高さ(Z)を表します。
アプリケーション
PCB点検

体積検査 (物流)

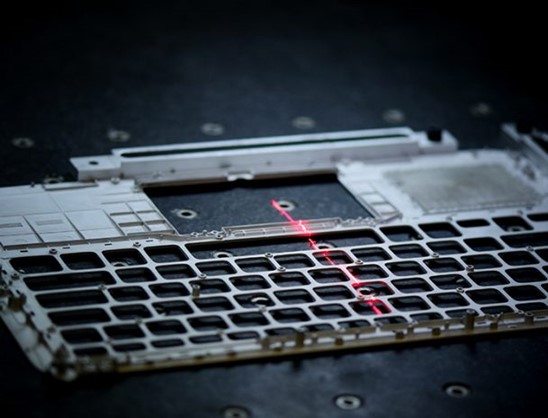
動作中点検

路上検査

3D検査
形状の測定
市場の主課題
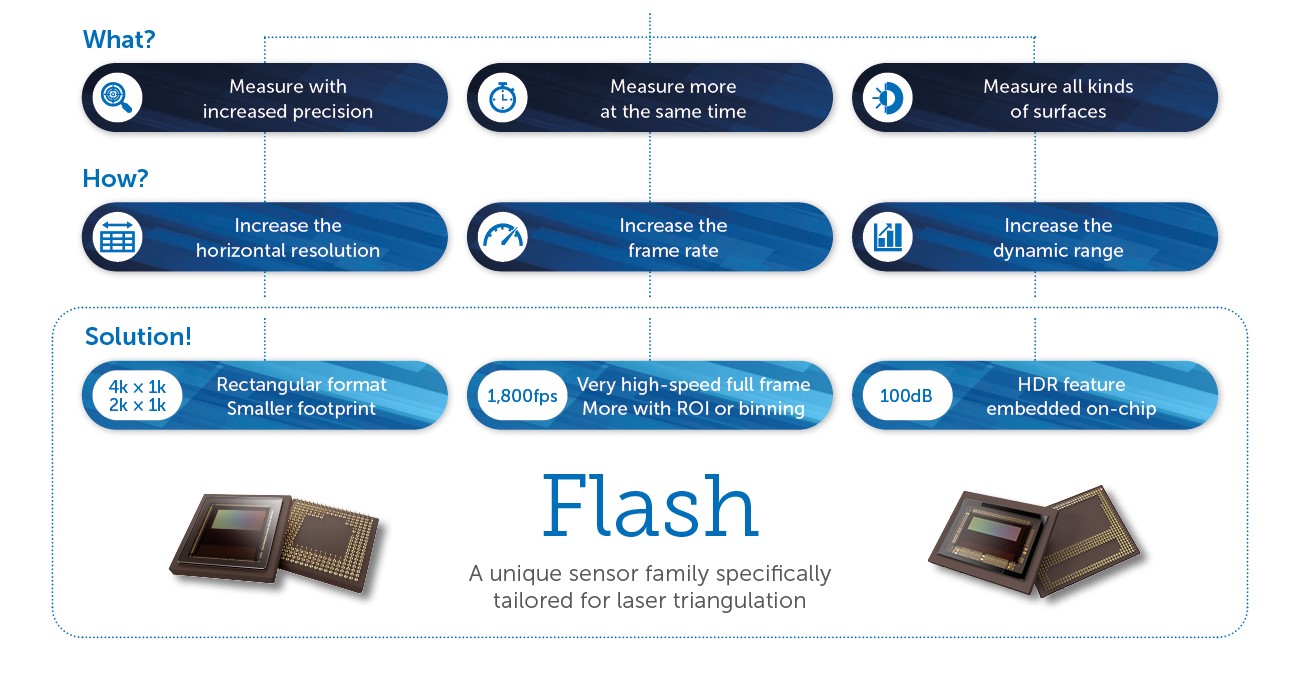
弊社の専門知識と能力
Teledyne e2vは、レーザー三角測量アプリケーション用センサーの設計に20年以上の経験を持っています。市場をリードするカメラメーカーに標準既製センサー(Flashなど)と、個別ニーズに合わせて特別設計されたカスタムセンサーを提供しています。ソフトレベルとハードレベル両方の標準センサーでデリバティブが可能であるだけに、分化も可能になります。以下にいくつかの例を挙げますが、追加デリバティブはオンデマンドで利用できます。
ソフトデリバティブ
たとえば、ピクセルのウェル全体の容量を増やしたり、フレームレートをLVDSの数や消費電力とトレードオフできる低電力モードを使用したりする可能性があります。使用するLVDSを減らしたい場合、またはアプリケーションにとって消費電力が重要な場合などにそれらが可能です。
ハードデリバティブ
カスタムカラーフィルターアレイまたはカスタムマイクロレンズアレイをセンサーに追加する可能性があります。弊社が提供するもう1つのデリバティブは、シャインプフルーク角に関するものです。レーザー三角測量では、通常、光学システムが検出面に垂直ではなく、特定の角度に傾斜している必要があります(以下を参照)。これはシャインプフルーク原理と呼ばれ、センサーの角度応答による信号の喪失を意味します。これは、角度が大きい場合極めて重要になる可能性があります。これは、アプリケーションで使用する角度に合わせて特別に調整された単純デリバティブによって補正できます。
顧客サポート

評価キット
リファレンスデザイン

ローカルサポート
ウェビナー
Teledynee2vの3DイメージセンサーのマーケティングマネージャーであるYoann Lochardetのレーザー三角測量に関するオンラインセミナーに参加してください。Yoannは、コンセプト、その仕組み、課題、およびそれらを克服する方法について説明します。

ダウンロード
-
パンフレット